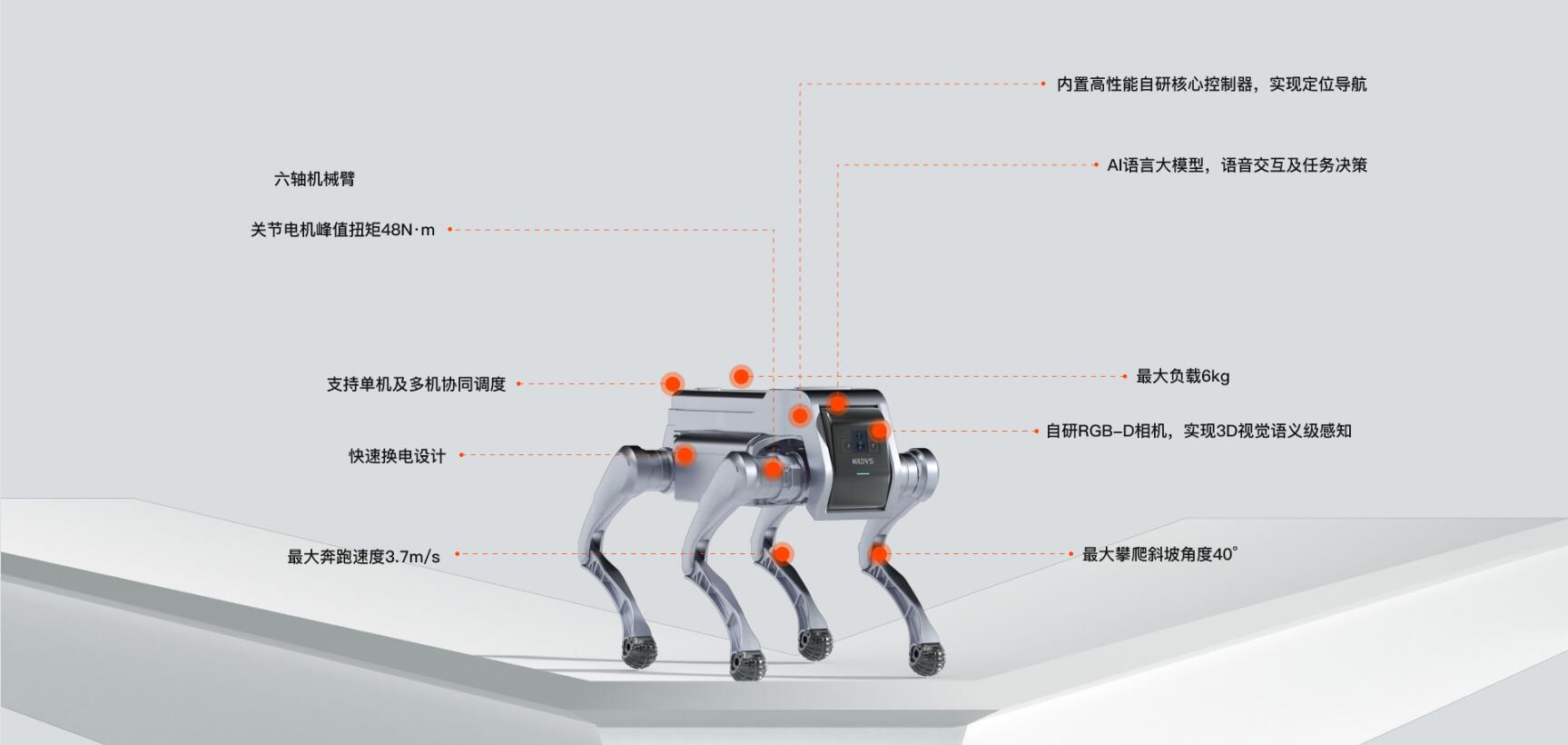
最大奔跑速度3.7m/s
最大攀爬斜坡角度40°
自研RGB-D相机,实现3D视觉语义级感知
快速换电设计
六轴机械臂
关节电机峰值扭矩48N·m
支持单机及多机协同调度计
最大负载6kg
AI语言大模型,语音交互及任务决策
内置高性能自研核心控制器,实现定位导航








最大奔跑速度3.7m/s
最大攀爬斜坡角度40°
自研RGB-D相机,实现3D视觉语义级感知
快速换电设计
六轴机械臂
关节电机峰值扭矩48N·m
支持单机及多机协同调度计
最大负载6kg
AI语言大模型,语音交互及任务决策
内置高性能自研核心控制器,实现定位导航